1 Introduction
The wearable lower limb assisting robot is a kind of auxiliary rehabilitation robot, and is a power assisting device that helps people to expand the lower limbs' movement ability. The basic principle is based on the human body motion behavior awareness information, and is installed on the leg joints ( The servo motor at the hip joint and the knee joint drives the joint motion, and the joint movement and the value of the speed change to achieve coordinated movement with the human leg and provide assistance to reduce the exercise intensity of the person under heavy load or long walking. The treatment and orthopedics of those who have abnormal sports behaviors form a harmonious and perfect whole with the human body.
At present, there are about 10 laboratories in the world engaged in the research of wearable human-powered robots. Among them, Japan and the United States are at the forefront, and no relevant reports have been reported in China. In 2002, Tsukuba University of Japan developed a hyhrid assis-TIve limb (HAL), a mechanical exoskeleton tied to the sides of the human leg, using an EMG sensor attached to the skin of the leg. The muscle current is detected and the electric motor is controlled to drive the mechanical exoskeleton movement to assist the movement of the leg. The University of California, Berkeley Robotics and Ergonomics Laboratory developed the US Army "Berkeley lower extremity exoskeleton" (BLE-EX), consisting of a backpack-style outer frame, metal legs and corresponding hydraulic drive equipment. Similar to the humanoid structure, the backpack-type outer frame enables the operator to carry a certain load, and its effective force is transmitted directly to the ground through the exoskeleton without passing through the wearer. The lower extremity exoskeleton can carry an external load and its own weight (including the weight of the operator) to travel long distances on rough roads, enabling soldiers with fully armed forces to increase their load-bearing capacity and speed their march. However, the above devices have the common disadvantage that the myoelectric sensor is based on the weak current signal transmitted by the skin surface during muscle activity or the softness and hardness of the muscle to infer the behavioral consciousness of the human body, so that most of the sensors used are directly related to the human skin. Contact and paste on the skin requires special fixing devices, which directly leads to inconvenience in wearing; the sweat secreted by the human body and the quality of the sensor installation will affect the stability and accuracy of the acquired information, and the amount of information is large and complicated. It is susceptible to interference, making control more difficult. Therefore, this paper designs a new type of wearable lower limb assisted robot sensing system, which is used to obtain the contact force between the human lower limb and the robot exoskeleton. The force information and joint angle information are used to control the robot exoskeleton to achieve the human body. The power of lower limb movement.
2 power robot system
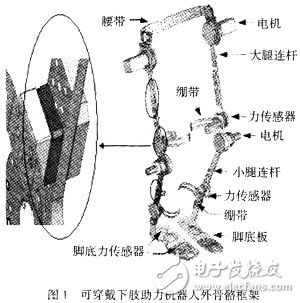
The wearable lower limb assisted robot is mainly composed of three parts: mechanical, sensing and control. The robot's outer skeleton contains 12 degrees of freedom, each leg has 6 degrees of freedom, the hip joint contains 3 degrees of freedom, and the knee, ankle, and sole each contain 1 degree of freedom. This design requirement not only conforms to the previous anthropomorphic robot walking. The design requirements of the mechanism, and the design requirements that are in harmony with the movement of the human leg and do not produce motion interference, as shown in Figure 1.
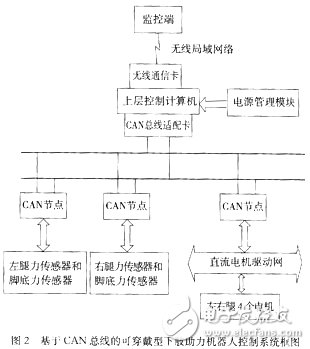
The executive part mainly refers to the DC servo motor. The system requires four, which are respectively fixed on the hip joints and knee joints of the two legs. The wearable lower limb assisted robot control system mainly adopts PC104 embedded control system board and PC104CAN card. The control structure of the whole system is shown in Fig. 2.
High Frequency AC Power Supply
Adapter Power Regulated,Ac To Dc Regulated Power Supply,High Voltage Regulated Power Supply,High Voltage High Frequency Power Supply
Yangzhou IdealTek Electronics Co., Ltd. , https://www.idealtekpower.com