Principle and Design of Adaptive Noise Cancellation System in Voice Communication
The statistical characteristics of noise are closely related to the scene. Even if the statistical characteristics of noise on the same occasion may change with time, this requires that the noise canceling equipment must have the adaptive ability of noise tracking. Realistic voice communication may occur in a noisy and noisy environment. For example, mobile phone communication in a factory will be affected by the roar of the machine; voice communication in the train cab will be interfered by the operation of the motor and the collision of railroad tracks.
After more than 40 years of development and improvement, the theory of adaptive signal processing has been applied in many fields [1,2]. In this paper, the adaptive signal processing technology is applied to the noise cancellation of voice communication. Through simulation research and prototype experiments, the software and hardware parameters are optimized, and an adaptive cancellation for mobile phone microphones and train cabs is developed. system.
1 Principle of noise cancellation
The principle of the adaptive noise cancellation system is shown in Figure 1. He has two inputs: the original input and the reference input, the reference input is the noise source ν1 (n), and the original input is the noise-contaminated signal x (n) = s (n) + ν0 (n). When the noise component ν0 (n) is not related to the signal s (n), but is related to the noise source ν1 (n), the adaptive filter AF can adjust the coefficients of its own filter according to the error signal ej, so that its output yj tends to Î0 (n) in the original input, so that the error signal 0 tends to the signal s (n).

The least mean square (LMS) algorithm occupies a pivotal position among many adaptive signal processing algorithms due to its advantages of simple algorithm, small amount of calculation and easy implementation [3,4]. The system design of this paper adopts recursive method to implement LMS algorithm.
The output of the adaptive filter AF at time j is expressed as: 
Here, Wj is the filter coefficient at j, and Xj is the filter input at j. The weight coefficient at the next moment (j + 1) should be adjusted according to the error signal ej at the current moment j. The recursive algorithm for the adjustment is: 
Where μ is the step size factor, which affects the convergence of the system. The sufficient conditions for the system to converge are: 
The value of μ should be considered for the practical compromise of voice communication: when μ is too small, the weight coefficients converge slowly and cannot adapt to the occasions where the noise is unstable; when μ is too large, the cancellation effect is poor, and even causes the system to diverge.
2 System simulation
2.1 Acquisition of sound samples
The signal processing toolbox of Matlab 7.0 provides a Simulink module --From Wave Device that reads audio data in real time from a computer standard audio device, as shown in Figure 2.
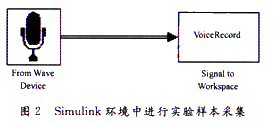
The Signal To workspace in Figure 2 saves the collected audio data to the Matlab workspace. As an example, this article collected about 0.3 s of human voice as the original signal, the sampling rate is 16 kHz, and its time-domain waveform is shown in Figure 3.

2.2 Step factor optimization
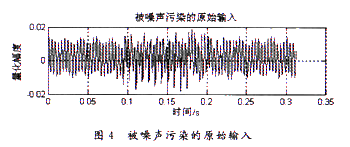
A 250 Hz sine wave is used to simulate the site noise. Taking into account the site noise situation, the value of the noise amplitude should be equivalent to it, which is 0.01 here. The superposition of sound samples and noise is used as the original input of the system, as shown in Figure 4.
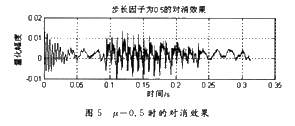
Take μ = 0.5 and adopt 128-order adaptive filter for speech denoising. It can be seen from Figure 5 that the output of the cancellation system after 0.03 s is similar to the original signal.
The Wj of the adaptive filter needs to be iterated many times to reach the ideal value, that is, E [ej2] E trend in [Eej2) min requires a process. In view of the step size, which will significantly affect the cancellation effect of the system, the following focuses on the The learning curve at different times is shown in the figure.
It can be seen from Figure 6:
(1) As the value of μ becomes larger, the learning speed of the system becomes significantly faster;
(2) When the signal is non-stationary, an excessively large value of μ can easily cause system out-of-adjustment, and the mean square error at 0.1 becomes significantly larger. Therefore, the value of μ should compromise the test rate: on the one hand, when the noise is non-stationary, the learning time of the system should be less than the stationary time of one tone (about 0.1 s); on the other hand, minimize the system imbalance. A detailed comparison shows that the learning time when μ = 0.25 is already less than the stationary time of one node, which is much better than when μ = 0.1, so the length factor of 0.25 can meet the needs of the system.

3 System implementation
3. 1 circuit design
The signal processor of the adaptive cancellation system uses TI's fixed-point DSP-TMS320VC5509. Its core clock can work steadily at 200 MHz. It takes only one instruction cycle (5 ns) to complete two multiply-accumulate (MAC) operations.
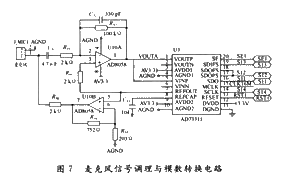
The system has two microphone channels, one of which is used to collect the original input and the other is used to collect the reference input. The circuit form of the two channels is exactly the same. The signal conditioning and analog-to-digital conversion circuit are shown in Figure 7. Among them 16 b Codec AD73311 is connected with DSP through synchronous serial interface. The reference output of the AD73311 goes through the buffer of the AD8058 as the DC bias of the microphone; the electret microphone signal is AC-coupled and the gain of the amplifier circuit is 50 to adapt to the dynamic range of the analog-to-digital converter. The data collected by AD733ll will periodically trigger the receiving interrupt, notify the DSP to receive the data and do the corresponding processing.
3.2 Software design
Adaptive filtering has high requirements on the real-time performance of the system, so weight factor recursion, filtering and noise cancellation are completed in the sampling interrupt service program. The software design uses the DSP instruction LMS specifically for adaptive filtering. This instruction can complete two parallel operations in one instruction cycle: multiply-accumulate (MAC) and weight coefficient recursion. This instruction greatly improves code efficiency and enhances the real-time nature of adaptive signal processing.
The TI-DSP development environment CCS5000 provides support for the corresponding DSP library Dsplib. The library contains conventional digital signal processing functions including adaptive filtering, most of which are assembly code, which has high code efficiency. The library function provides C language function prototype declaration, allowing C program to directly access, reducing the difficulty of digital signal processing programming.
The library function of adaptive filtering has strict requirements on the alignment of the first address of the buffer. The software uses the pseudo-statement "#pragma DATA SECTION ()" to place specific constraints on the memory allocation of the cmd file, thereby more rationally using the computing resources of the DSP chip .
4 Conclusion
After repeated experiments, the prototype has been able to solve the denoising problem in voice communication under specific installation conditions.
In order to ensure that the noise components of the two channels have sufficient correlation, the installation distance of the microphone should be less than 20 cm, and the speaker (signal) distance should be less than 5 cm from the original input terminal, otherwise a large amount of uncorrelated noise will appear in the system output Weight.
It was found in the experiment that increasing the delay at the original input is helpful to improve the noise cancellation effect. After analysis, this is related to the working state of the adaptive filter. If the noise at the reference input leads the original input signal (out of synchronization), the adaptive filter is actually a predictor. The difficulty of prediction is higher than that of the filter. easy to accomplish. The simpler solution is to add software delay to the original input, thereby improving the ability of the cancellation system to adapt to the location of the noise source.
Organic Solderability Preservative is a cheap surface treatment.This surface treatment can protect the PCB Board surface and facilitate PCB Assembly. Its advantage is that it is easy to weld.this kind of PCB boards need to complete PCB assembly within three months. The board thickness from 0.2 mm to 6.0 mm, size from 5*5 mm to 600*650 mm can use the surface treatment of organic solderability preservative(Short name is OSP)

Organic Solderability Preservative
Organic Solderability Preservative,Organic Solderability Preservatives,Pcb Board Organic Solderability Preservatives
Orilind Limited Company , https://www.orilind.com