With the increase in the number of ECUs in automotive electronic systems, the amount of data that needs to be communicated via the CAN bus has also increased dramatically. According to past engineering experience, the bus load rate exceeding 30% will increase the probability of message delay, different buses. The probability that the load rate will cause the message to be delayed, and the amount of delay that can be caused, these problems are difficult to answer using existing analysis tools and tools. At the same time, two problems are also introduced (the bus load rate in the text refers to the CAN bus):
This article refers to the address: http://
Is the bus load rate more than 30% using the FlexRay bus?
If the bus load rate is below 30%, the message response time will not exceed Deadline?
The Fiat R&D department can answer the above two questions using the Symtavision user case.
Packet load rate below 30% will cause packet delay
The CAN bus load rate is an evaluation parameter that occupies the bus for the bus message in a statistical time. This is a very macro parameter. For example, the following example CAN bus: There are three ECUs that send different CAN messages according to different cycles.
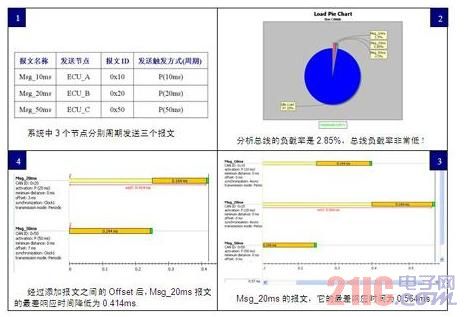
Figure 1: Modeling and analyzing CAN bus message delays using SymTA/S
In the SymTA/S analysis, the bus load rate is 2.85%. This load rate is small, but the detailed analysis message Msg_20ms is due to bus arbitration. The maximum response time of the message is 0.564ms (Deadline is 0.5ms); After the bus, the response time is effectively reduced. This is just a very simple example. It shows that there is a message delay when the bus load rate is lower than 30%. New tools are needed in the project to evaluate the bus validity and scalability. The bus load rate has certain limitations.
Re-recognize the bus load rate
The CAN bus load factor is only a macro parameter and the bus's validity and scalability have not been fully evaluated. The reason for this is that on the one hand, the electronic system is relatively simple and the number of bus messages is small. The simple limit of the bus load rate can meet the response time of the message, but the number of ECUs participating in the CAN bus communication or the number of bus messages. After the increase, there is no guarantee that the lower bus load rate will meet the response time of the message.
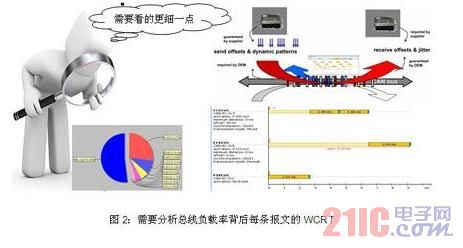
On the other hand, from a technical point of view, there is no previous tool that can help engineers analyze the more detailed factors behind the CAN load rate. It is impossible to analyze the delay of each message and the impact of the message on the bus. However, in the engineering application, the Deadline of a certain message is finally defined or evaluated. When the CAN communication system is complicated, the simple bus load rate cannot be used as a complete technical indicator to evaluate a CAN bus system, which requires more detailed Analyze whether the maximum response time (Worst Case Response Time) of each message of interest exceeds Deadline.
CAN bus load rate can be up to 70% - Fiat R&D Engineer
Fiat R&D engineers have long used Symtavision's time modeling analysis and verification tool, SymTA/S, to help them develop and validate CAN bus systems, using Symtavision's analysis tools in several models. When engineers develop the next-generation models, the communication capacity of the CAN bus is maximized under the premise of an increase in the number of system ECUs without using the FlexRay bus. Of course, the premise of these means is to ensure that the designed CAN bus meets the response time. (Deadline) requirements.
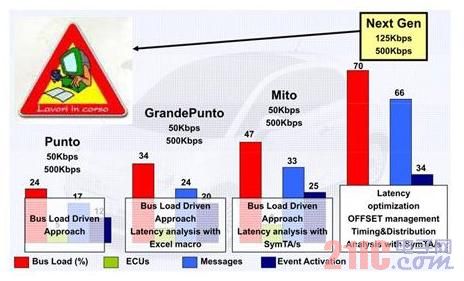
First, Fiat engineers imported the bus model (DBC) file into the SymTA/s tool, and then analyzed that some messages were sent longer than the predefined Deadline, and then some optimizations were made to the bus system to determine which ones exceeded the predefined ones. The maximum response time of the Deadline message is satisfactory, and the analysis finds that the CAN bus load rate is 70%.
in conclusion
Symtavision's time modeling, analysis and verification tools allow developers to analyze not only the bus load factor but also the maximum response time of each message when determining whether the CAN bus is feasible. This makes the analysis of the CAN bus a step further.
The load rate of the CAN bus as a macro parameter is not important. It is important that each message meets the time constraint.
Food Processor 15 In 1 is the most mult-function Food Processors among our products. They have 15 kinds functions. Please check the details as follows.
Description for Food Processor 15 In 1
450E/600W/800W
With juier, blender, fliter, grinder, mixing, chopping, citrus, dough making, egg whisk, slice, shred, mash, frech fires making
1.5L PC blending jar, 1.5L AS mixing jar
ABS power house with spary paint color
2 speeds with pulse,VDE 2 pin plug

Food Processor 15 In 1
Food Processor 10 In 1,Steel 10 In 1 Food Processor,10 In 1 Vegetable Blender,10 In 1 Baby Food Blender
Flying Electronic Co., Ltd , https://www.flyingelectronic.com