0 Introduction Automobile anti-lock braking system, also known as ABS, is a safety brake control system with the advantages of anti-skid and anti-lock. In the case of a car without an ABS system, in an emergency, it is too late to brake slowly, and you can only step on one foot. At this time, the wheel is easy to lock, and the vehicle's sprint inertia may cause side slip, deviation, and direction. Dangerous conditions such as control; and in vehicles equipped with ABS, when the wheel is about to reach the next deadlock point, the brake can be applied 60 to 120 times in one second, which is equivalent to non-stop braking and releasing, which is similar to mechanical Braking. " Therefore, it can avoid uncontrolled direction and wheel slip during emergency braking, so that the wheels are not locked during braking, and the tires do not rub against the ground at one point, which increases the friction and makes the braking efficiency reach more than 90% [1] .
The key control component of the ABS system is the ABS electronic controller, or ECU. Based on the analysis of ABS braking principle and controller structure, this article selects a dsPIC30F5011 single-chip microcomputer with powerful data processing function for a certain vehicle model, combined with the ABS system chip, completes the ABS_ECU hardware design, and develops the control program. Simulation experiments were carried out on the loop simulator, and good results were obtained.
1 ABS braking principle In the braking process of a car, the external force that makes the car brake and slow down is the ground braking force that the road surface acts on the tire tread, but the ground braking force depends on the friction force of the two friction pairs: one It is the friction force of the braking device against the wheels, that is, the brake braking force; the other is the friction force between the tire and the road surface, that is, the ground adhesion. Only when the car has sufficient brake braking force and ground adhesion, can it obtain sufficient ground braking force [2]. There is usually a slip phenomenon in the process of automobile braking, that is, there is relative slip caused by the speed difference between the vehicle speed and the wheel speed. The degree of this slip is expressed by the slip rate: 
When the car brakes, the relationship between the adhesion coefficient and the tire slip rate is shown in Figure 1, where φ represents the adhesion coefficient. 
It can be seen from Figure 1 that when the slip ratio is 15% -20%, the adhesion coefficients in the lateral and longitudinal directions are relatively large, and a large number of research tests also show that the braking effect of the car is the best at this time.
ABS In the process of automobile braking, when the wheels tend to lock, the pressure of the brake system is quickly reduced, and the wheel slip rate is restored to the ideal stable area. The pressure of the brake system is adjusted by automatic and high frequency to make The wheel slip rate is kept in a narrow range near the ideal slip rate to make full use of the longitudinal peak adhesion coefficient and high lateral adhesion coefficient between the wheel and the road surface, so as to prevent wheel locking and obtain the best braking efficiency [ 3].
2 ECU hardware design
2.1 ECU structure
The ABS system is mainly composed of three parts: wheel speed sensor, electronic controller (ECU), and solenoid valve. The core part of the system is the ECU. Its composition is shown in Figure 2. It mainly includes system power management, wheel speed signal processing, processor (microcontroller), solenoid valve driver and ABS fault detection.
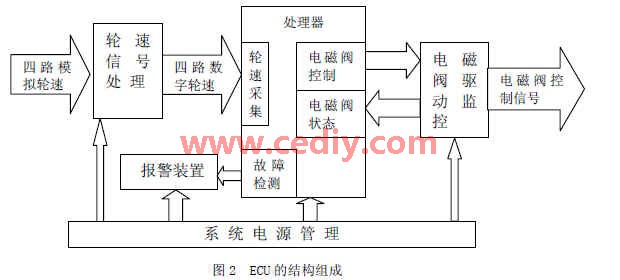
The wheel speed signal processing module converts the input analog wheel speed signal to obtain a regular digital wheel speed input into the processor, which calculates and judges whether each wheel is tending to lock up; the solenoid valve drive monitoring module amplifies the The solenoid valve control signal of the processor enables it to drive the actuator (brake pressure regulator) to adjust the brake pressure so that the wheel speed is in a continuous cycle of boost-pressure-pressure-reducing state, and at the same time feedback the current solenoid valve control signal To the processor to monitor the control logic.
2.2 Processor selection and design
The most critical part of the ECU is the processor. At present, most of them use 16-bit microcontrollers as the processor of the ECU. On the one hand, they collect wheel speed signals and enter the ABS algorithm for processing. -Holding pressure-decompression processing; at the same time, it also expands the fault detection and solenoid valve monitoring parts to ensure the normal operation of the ECU. Whether it is wheel speed acquisition and algorithm processing, or the control of wheel brake pressure, the core processor has high requirements: strong real-time performance, good stability, and high data processing accuracy. Microchip's dsPIC30F5011 as high performance 1
Bit digital signal controller not only has the control function of single chip microcomputer, but also combines the digital signal processing capability of DSP. The chip contains a complete DSP engine: including a high-speed 16 × 16 integer multiplier, a 40-bit ALU, two 40-bit saturation accumulators, and a 40-bit bidirectional shifter, which can obviously Improve chip computing power. The instruction system is divided into two categories: single-chip and DSP. The single-level instruction prefetch mechanism makes most of its instructions single-cycle. On-chip integrated 66K FLASH, 1K EEPROM, 4K RAM, 8-channel input capture, an 8-channel pulse width modulation module (PWM). Combined with ICD2 (on-chip debugger) in the MAPLAB IDE development environment, program editing, compilation, online debugging and downloading of the microcontroller.
The distribution of the processor's functional interfaces is shown in Figure 3. The dsPIC30F5011 input capture port (IC1… 4) is used to collect 4 sets of wheel speed signals. The state of the wheel speed signals can be accurately detected according to the set acquisition mode. After the ABS algorithm, the output solenoid valve control is output through the 8-channel I / O port At the same time, the state of the solenoid valve is fed back to the processor from the 8-channel I / O port, forming a closed loop to monitor the control logic of the algorithm. At the same time, a PWM port is used to output the alarm light signal, and the fault type is judged by setting the flashing frequency of the alarm light. The brake signal from the brake board enters the single-chip microcomputer via the optical coupling isolation. The effective braking signal is an entry condition for entering the ABS algorithm. 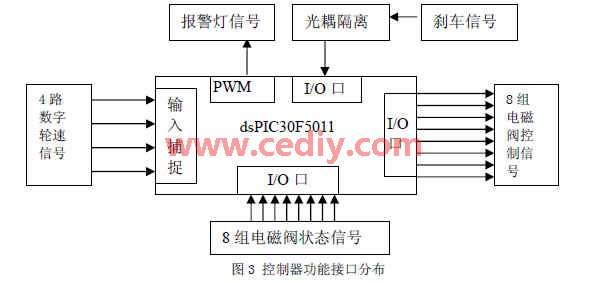
2.3 Wheel speed collection and processing The electromagnetic wave type wheel speed sensor converts the wheel speed into a sine signal proportional to the wheel speed. Generally, the frequency of the wheel speed signal is lower than 1KHz, and the amplitude is relatively low, and the amount of interference is large. It is converted into a square wave signal of TTL level, so a signal conversion circuit is required to input the converted wheel speed signal into the processor. This design uses 4-channel wheel speed acquisition. The LM324A amplifies the wheel speed signal, and then uses low-pass filtering and filtering in the algorithm to reduce the amount of interference. Finally, the digital wheel speed signal after 74HC14 shaping is a square wave. Can be input into the processor.
2.4 Output and Processing of Solenoid Valve Control Signal After the ABS algorithm, the processor generates 8-way solenoid valve control signals, and uses two-way solenoid valve control signals as a group to control one wheel. The combined control strategy is: 00 holding pressure; 01 pressure increasing; 10 pressure reducing. The solenoid valve control signal output by the processor is only a few tens of milliamperes, and the current required by the execution part is 1 to 2A, so the solenoid valve control signal needs to be amplified. This design uses Infineon's ABS system driver chip TLE6216, each of which can drive four solenoid valve control signals, and at the same time feedback the current solenoid valve status to the processor to monitor the control effect.
2.5 Power supply and fault detection The battery or generator is the power supply in the car. The battery of the heavy-duty vehicle is 24V, the working voltage of the generator is 28V, and the working voltage of the single-chip computer is 5V. Therefore, in addition to the power supply, voltage conversion is required. In the design, Infineon's ABS system power chip TLE6210 is used, which can convert the voltage of 12V to 5V required by the single-chip microcomputer, and integrate functions such as alarm light and engine drive. In addition, the voltage monitoring logic module is integrated in the TLE6210. When the input or output voltage is detected to be too high or too low, the pin RES1 / RES2 will generate a reset pulse to reset the entire system. Since the system power supply has an analog part and a digital part, it is necessary to add an isolation inductance between the two parts of the power supply to prevent the interference between the analog circuit and the digital circuit in the system.
The failures caused by ABS mainly include: system power supply failure, wheel speed sensor failure, ABS system operation failure, solenoid valve failure, etc. The operator can determine the source and type of failure by the flashing frequency of the failure alarm light, and the corresponding failure The code is stored in the EEPROM for the host computer to identify and process.
3 software design The current ABS system mainly uses the reference threshold control method, namely Bosch control logic. This is a logic widely used today. This method uses the combination of wheel angular deceleration, angular acceleration and slip rate as control parameters [4]
This paper adopts the control strategy that takes the angular acceleration and angular deceleration of the wheels as the main threshold and the slip rate as the auxiliary threshold. The specific implementation flowchart is shown in Figure 4. 
When a valid brake signal is detected, the processor collects the wheel speed pulse signal through the wheel speed sensor, and then calculates the vehicle speed and acceleration. When the vehicle speed is high, the slip rate logic threshold algorithm is called, and the solenoid valve outputs the pressure, The decompression and supercharging signal, that is, supercharging during initial braking, maintains pressure when the acceleration threshold is reached, and the slip rate is still maintained in the stable area. After a period of time, the deceleration is reached when the slip rate reaches a stable threshold. Such reciprocation makes the speed of the vehicle decrease in waves. If the vehicle speed is low, the solenoid valve directly outputs the boosting or holding pressure signal. At this time, the wheel speed has been decreasing and there is no rebound until it decreases to zero.
4 Hardware-in-the-loop simulation test utilizes the hardware-in-the-loop simulation system developed in the national "863" plan project "Embedded System Development Platform for Automotive Electronic Control and Its Applications" (2004AA1Z2380) (as shown in Figure 5) We have simulated the braking process of this ABS controller. The simulation results are shown in Figure 6 and Figure 7. 
Figures 6 and 7 show the braking process of a heavy-duty air-pressure brake on a road with a low adhesion coefficient and an initial speed of 33 (m / s). Observe the state change of the solenoid valve corresponding to the wheel speed curve: pressurization-holding pressure-decompression; when the wheel speed rises, the state change of the solenoid valve is: decompression-holding pressure-boosting. It can be seen that, under braking, the vehicle under ABS ECU control can better prevent wheel lock, wheel speed fluctuations are relatively stable, and the braking time is short, so this controller has a good braking effect.
5 Conclusion The dsPIC30F5011 from Microchip is used as the processor of the ABS system, which realizes the rapid collection of wheel speed, discrimination processing, and the calculation of slip rate and other parameters, ensuring the real-time and stability of the control. At the same time, combined with Infineon's ABS system chip, the system's power management and solenoid valve drive are more optimized. Through multiple simulation tests, it can be seen that the braking effect of this ABS controller is good.
The author of this article is innovative: choose DCS (Digital Signal Controller) dsPIC30F5011 as the processor, which solves the fast and large amount of data transmission and calculation. The operating cycle of the ABS logic threshold algorithm written in C language can be kept within 5ms; the use of dedicated ABS The chip optimizes the power management and solenoid valve drive of the ABS controller, which can shorten the development time and ensure the integrity and stability of the system. Provided test data and design reference for the commercialization of ABS controller.
Rj45 Coupler,Rj45 Surface Mount Jack,Electrical Cable Couplers,Phone Connector Wiring
Dongguan Fangbei Electronic Co.,Ltd , https://www.connectorfb.com