introduction
GPS (Global Positioning System) is the second-generation radio satellite navigation and positioning system in the United States. It can provide navigation, positioning, and timing information globally, around the clock, and in real time, but it also requires direct visibility to the satellite to perform its normal functions. . When encountering high-rise buildings, boulevards, overpasses and culvert tunnels in cities, the signal quality of the navigation satellites received by the GPS receiver will be significantly reduced, and even a "star-loss phenomenon" may occur. This makes it impossible to use GPS alone for navigation and positioning to continuously provide navigation and positioning information for moving vehicles. Therefore, we have adopted a combination of positioning technology to solve the above problems, the following specific analysis.
Dead reckoning (DR, Dead-Reckoning) is a commonly used navigation and positioning technology. Its basic principle is to use the direction sensor and speed sensor to estimate the instantaneous position of the vehicle, which can achieve continuous autonomous positioning. However, because its estimation process is an accumulation process, the error of the direction sensor accumulates with time. In addition, the estimation can only determine the relative position and course. When the navigation starts, it is necessary to predict the initial absolute position and direction of the vehicle. Therefore, the dead reckoning method cannot be used alone and for a long time. Combining dead reckoning with GPS, the two can make up for each other's shortcomings, which can make up for their shortcomings, and ensure that the system can provide more accurate navigation information for moving vehicles at any time. On the one hand, the accurate positioning results of GPS can be used to assist the initialization of the DR and it can be used to periodically correct the positioning error of the DR. On the other hand, when the GPS cannot be located, the system can automatically switch to the DR navigation mode until the GPS is restored. After normal reception, the system returns to the combined navigation mode of GPS and DR. At the same time, by matching the output information of the integrated navigation system with the electronic map in real time, the navigation output information can be visualized, which solves the problem of difficult orientation of the driver.
The composition of vehicle-mounted GPS / DR integrated navigation system
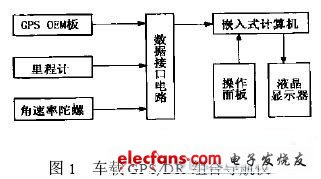
The car GPS / DR combined navigator is composed of 3 parts: GPS positioning system part dead reckoning part map matching part. Figure 1 is a schematic diagram of the car GPS / DR integrated navigator.
Global Positioning System
The global positioning system consists of a GPS-OEM motherboard, a data conversion board, an antenna, and a power supply.
At present, many manufacturers can provide GPS-OEM board products, such as SiRF, Conexant, Sych ip, GARM IN and other companies. Among them, GARM IN is the most famous professional GPS manufacturer trusted by users in the world, and has been at the forefront of the world in the field of GPS positioning and navigation. Because the positioning speed of GARM IN OEM board is fast, the operation is stable, the voltage shock resistance and the high anti-interference, so this solution uses the GPS15-LVC board produced by GARM IN company.
The data conversion board is connected with the GPS-OEM board. Its function is to receive the original data of the GPS motherboard, extract the required data and convert it to the data format required by the user machine, and send it to the user machine through the serial port.
Dead reckoning system
Dead reckoning system is composed of angular rate gyroscope, odometer, low-pass filter, V / F converter, level converter, counter, microprocessor, communication line and other hardware. The direction sensor uses angular rate gyroscope and distance sensor Use odometer.
Dead reckoning method is a commonly used autonomous vehicle positioning technology, in which course and distance sensors are used to measure displacement vectors to estimate the vehicle's position. The position of the vehicle at time tk can be expressed as:
![]()
Where (x0, y0) is the initial position of the vehicle at time t0, (xk, yk) is the position Si of the vehicle at time tk, and θi is the vehicle's position from the time TI (xi, yi) to the position TI + 1 (Xi + 1, yi + 1) The length and absolute heading of the displacement vector. The relative heading is defined as the difference between two consecutive absolute headings, expressed in Xi. If the relative heading measurements Xi at t0, t1, and tk are given, the absolute heading θk of the vehicle at tk can be calculated by the following formula:
![]()
Map matching
The map matching algorithm uses the method of probability determination. The system must know the position and heading angle of the starting point. Usually, the heading change given by the rate gyroscope is compared with the map features near the expected position of the vehicle. When the measured significant heading change of the vehicle is related to the vector route change of the digital map, then the real position of the vehicle can be on the map determine. According to the specific position of the vehicle, the drift error of the sensor can be corrected, and the errors such as the wheel diameter error can be calibrated. The correlation map matching algorithm works best when there is a relatively large change in the heading of the vehicle (for example, when the vehicle is turning at an intersection).
test results
In order to verify the positioning accuracy and reliability of the system and compare the performance of the GPS system and the GPS / DR combined system, an electronic map was made using a scale map of 1: 500, and the route of the sports car was selected as shown in FIG. 2 for the sports car test. The obtained test results show that when GPS alone is used for positioning, the obtained positioning trajectory is discontinuous, and there is an “upper house phenomenonâ€. But after using GPS / DR to combine, its positioning trajectory is continuous, and it is always driving on the correct road.

in conclusion
The GPS / DR combined vehicle positioning and navigation system combines GPS and DR, thereby improving the effectiveness, integrity and accuracy of the system. Using the DR track estimation system can ensure the output of vehicle position information when the satellite signal is lost, and can also use map matching technology to further improve the accuracy of navigation. This system has the characteristics of all-round, all-weather, unobstructed, high precision, and has good application prospects.
Cordless Tyre Inflator,Cordless Handheld Car Air Pump,Best Cordless Tyre Inflator,Cordless Air Compressor Handheld
SHENZHEN SMARTNEWO TECHNOLOGY CO,. LTD , https://www.newopump.com